Topic rédigé en français en dessous, cliquez >> ici <<
 Hooray, new software updates Poppy Ergo Jr are available in alpha version!
Hooray, new software updates Poppy Ergo Jr are available in alpha version!
We just published this alpha version that fixes a couple of compatibility issues with recent Python modules, new support for the Raspberry Pi 4 and with several additional handy features requested by the community. Python 2 is no longer officially supported. Also, we switched to the desktop image, so you can plug a HDMI screen to your Ergo Jr.
 We’re excited to hear your feedback in terms of bugs and general opinion: feel free to try the updates and give your feedback by commenting this post! We’re aware of the English phrasing being awkward, please be kind while we’re fixing it
We’re excited to hear your feedback in terms of bugs and general opinion: feel free to try the updates and give your feedback by commenting this post! We’re aware of the English phrasing being awkward, please be kind while we’re fixing it 
 Download the alpha version now
Download the alpha version now
How I can test the v3.0.0alpha version on my Poppy Ergo Jr:
- Download the zip file on your computer
- Unzip it so that you get the ~7.5GB img file
- Flash the SD card with your computer:
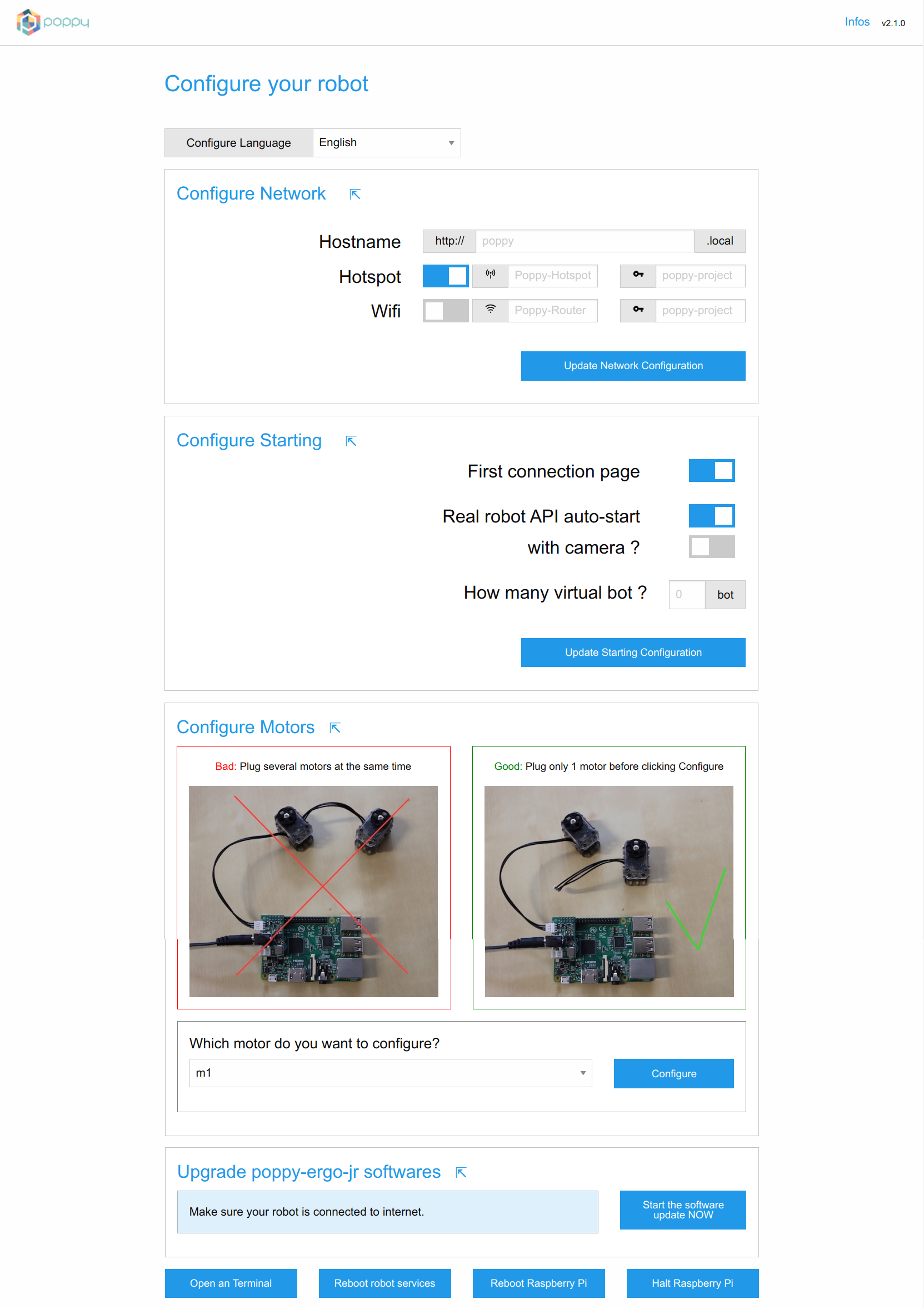
Read the docs: how to burn an image file - Insert the SD card in your robot and connect to
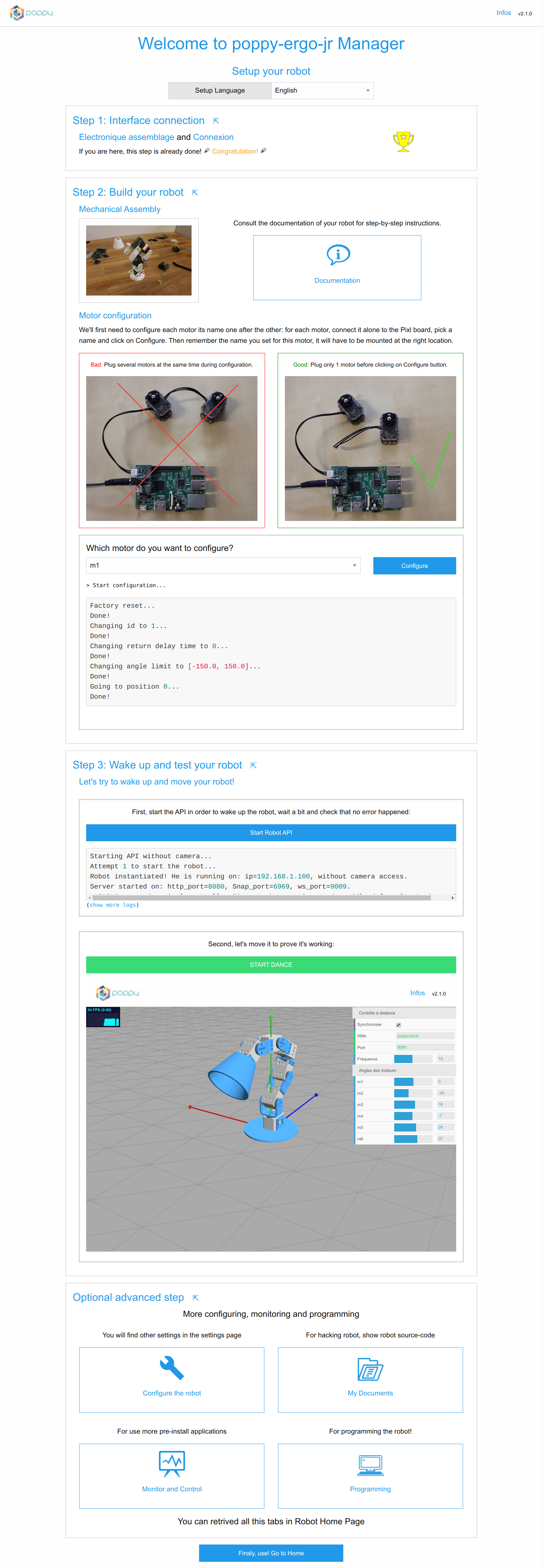
poppy.localto test it! The user interface will look like this:

Note: Please keep in mind that these are still alpha versions that might brick your robot software but it is always possible to rollback to the previous version if needed. This alpha update is not available from the Update robot button in the user interface and further updates with this button won’t work till the final release.
ChangeLog (v3.0.0alpha version)
New sd-image for poppy-creature on raspberry pi3 and pi4 !
Raspberry Pi OS (32-bit)
- Image with desktop based on Debian Buster (10.4)
- Version: May 2020 ; Release date: 2020-05-27 ; Kernel version: 4.19
- Release notes
Python
- Moved from Python 2.7 in Anaconda to regular Python 3.7.3 in a virtual environment
- Dropped the miniconda environment
- Created a Python virtual environment in the directory ‘pyenv’ of user Poppy
- Activated the Python virtual environment from user Poppy’s .bashrc
Pypot
- Updated ikpy to the latest version
- Added optionnal path for move recorder
- Added a self-hosted version of Snap to prevent CORS issues
- Added Snap entry points for webcam access in the REST API
- Added notebook ‘Another language’
Creatures
- Dropped support of
poppy.creaturethat must be nowpypot.creatures - poppy-ergo-jr known bug: marker_detector sensor is disabled (will be fixed for the release)
- poppy-ergo-jr add demo primitives
Raspoppyfication script
- Updated all scripts for Raspbian buster and for github branch usage.
- Wifi Hotspot : used an updated version for RPi4 and Raspbian buster.
- Added new poppy services
- Self-hosted off-line documentation
- Added poppy-simu as an offline viewer
- Added virtual robots
- Setup puppet-master documents
- updated Snap! version (5.4.5)
Web interface (Puppet-master)
- display rich detailed messages to help debug disconnected/broken motors or camera
- Disabled auto start of the robot API with Snap or the Monitor: the user is now prompted to do so
- Remove auto stop of the robot API with Jupyter: the user is now prompted to do so
- Pages of user interface improved as follows:
New pages:
- in index tab show screenshot
- monitor and control (folder tab)
- programming (folder tab)
- my documents (open jupyter root)
- poppy docs (open poppy docs)
- in nav bar
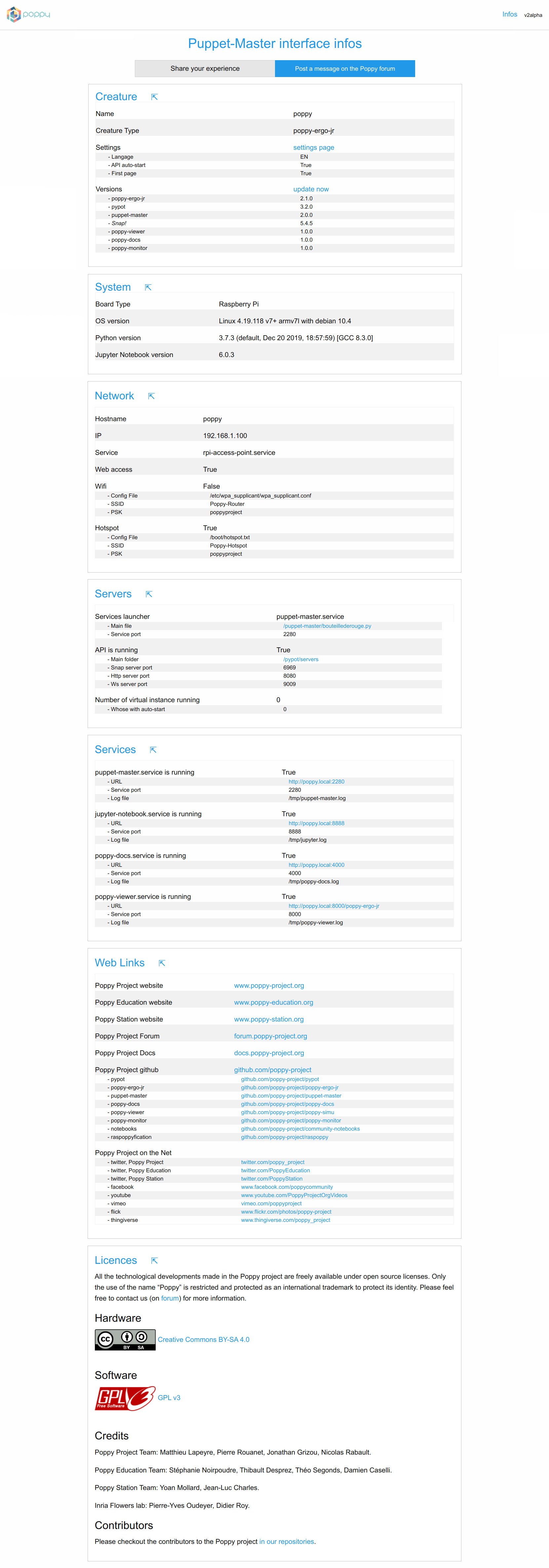
- infos (open html page) show screenshot
- first connection (is a html page if state True, redirect root page) show screenshot
- in monitor and control tab show screenshot
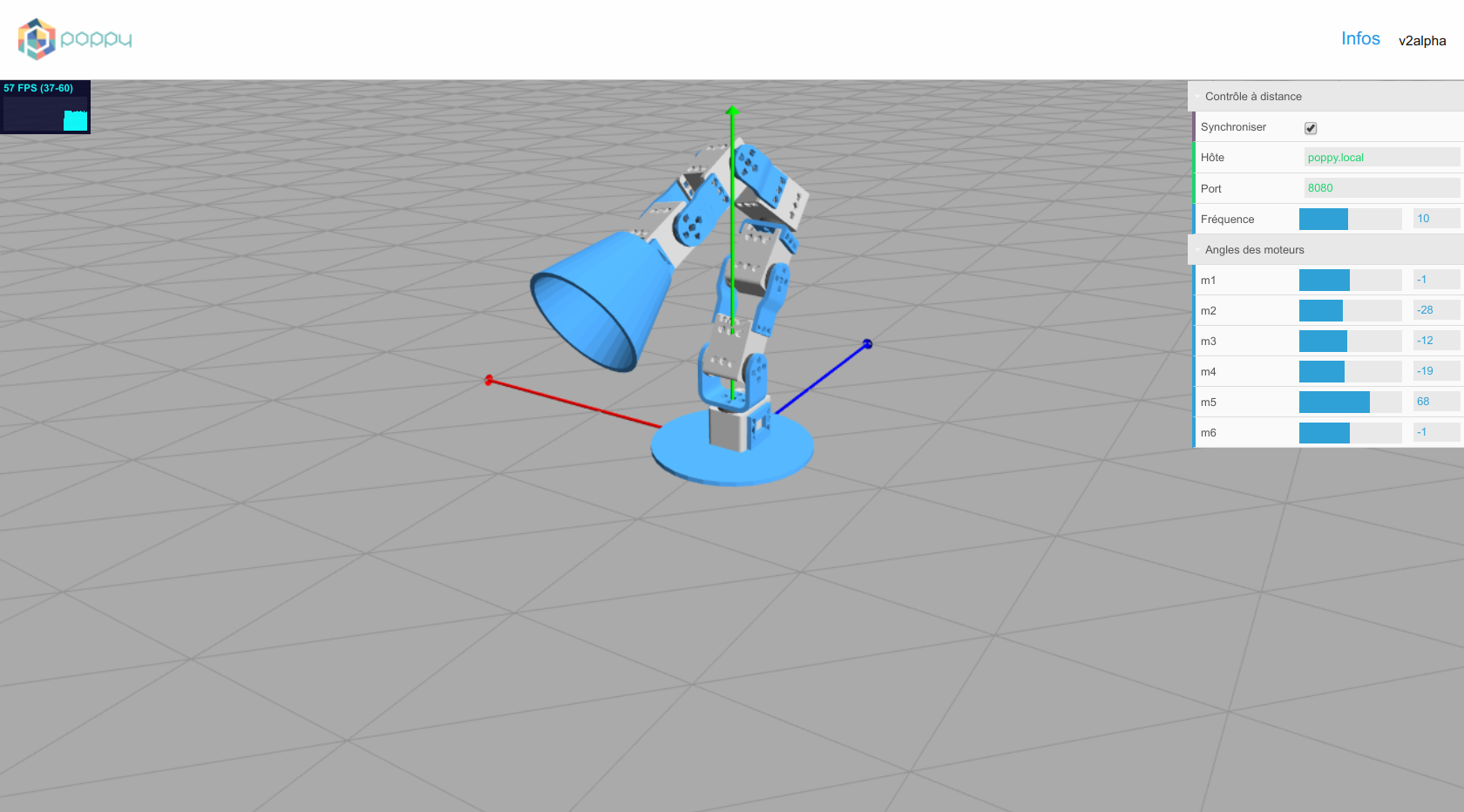
- poppy viewer (open html page) show screenshot
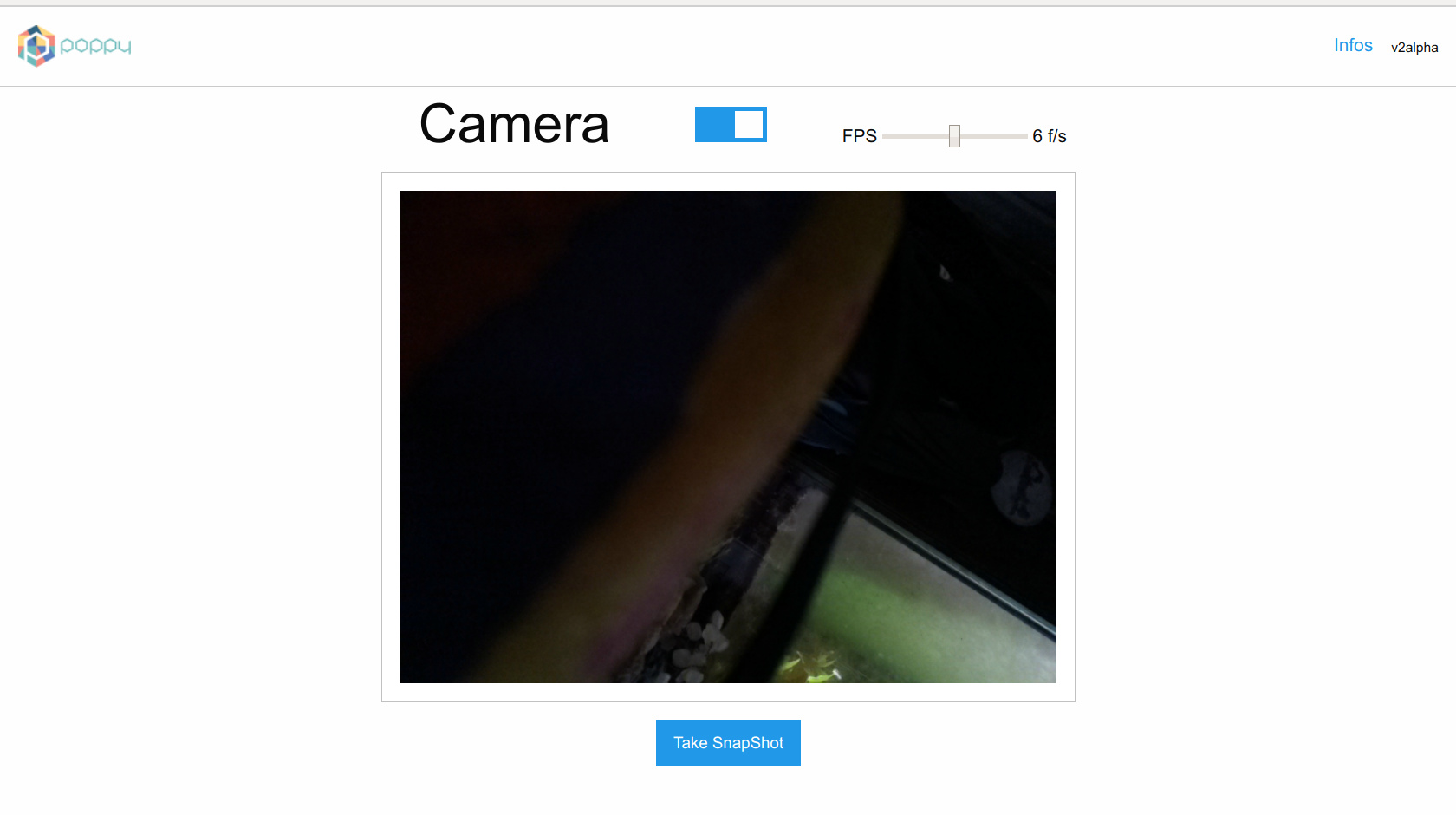
- poppy web cam access (open html page) show screenshot
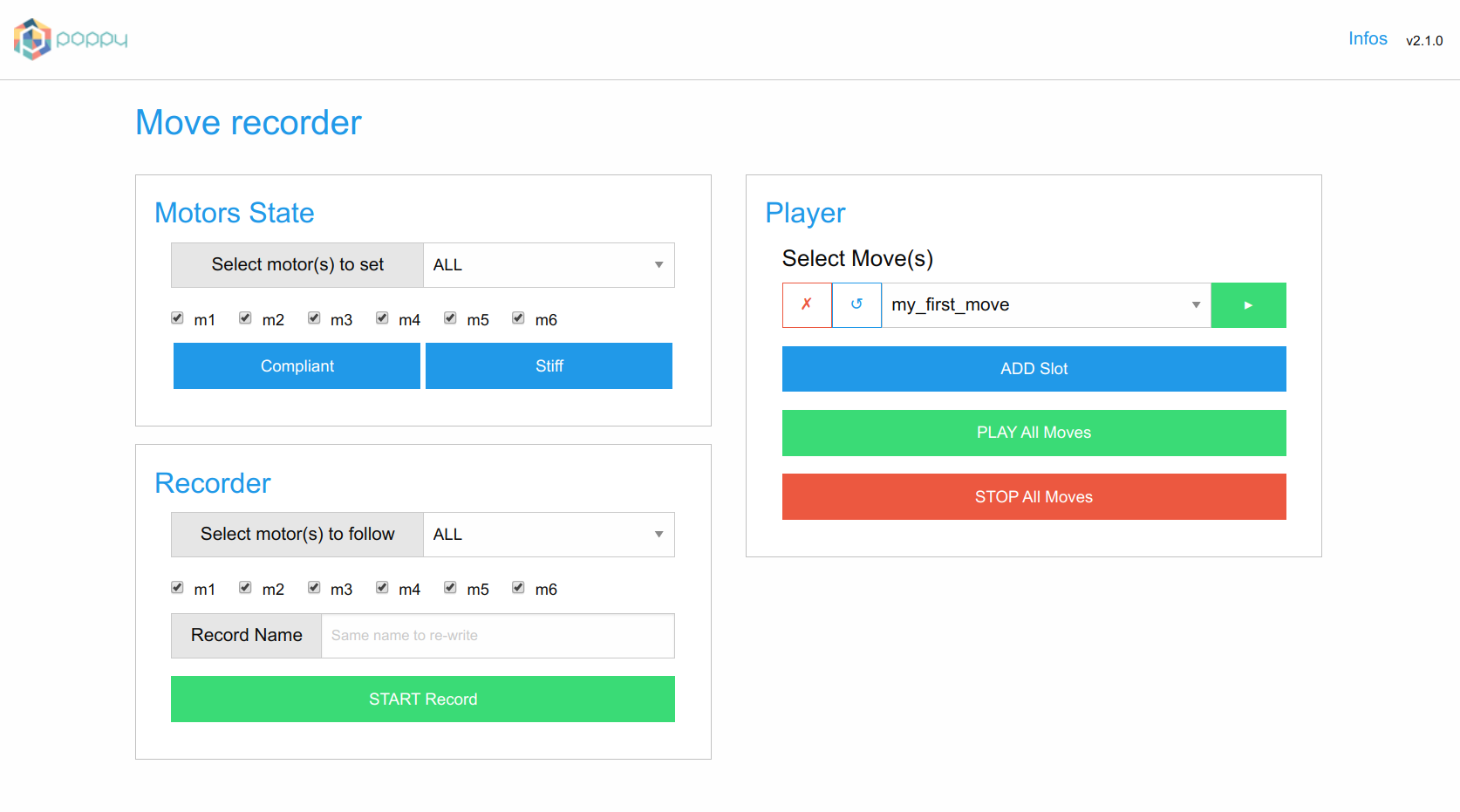
- move_recorder (open html page) show screenshot
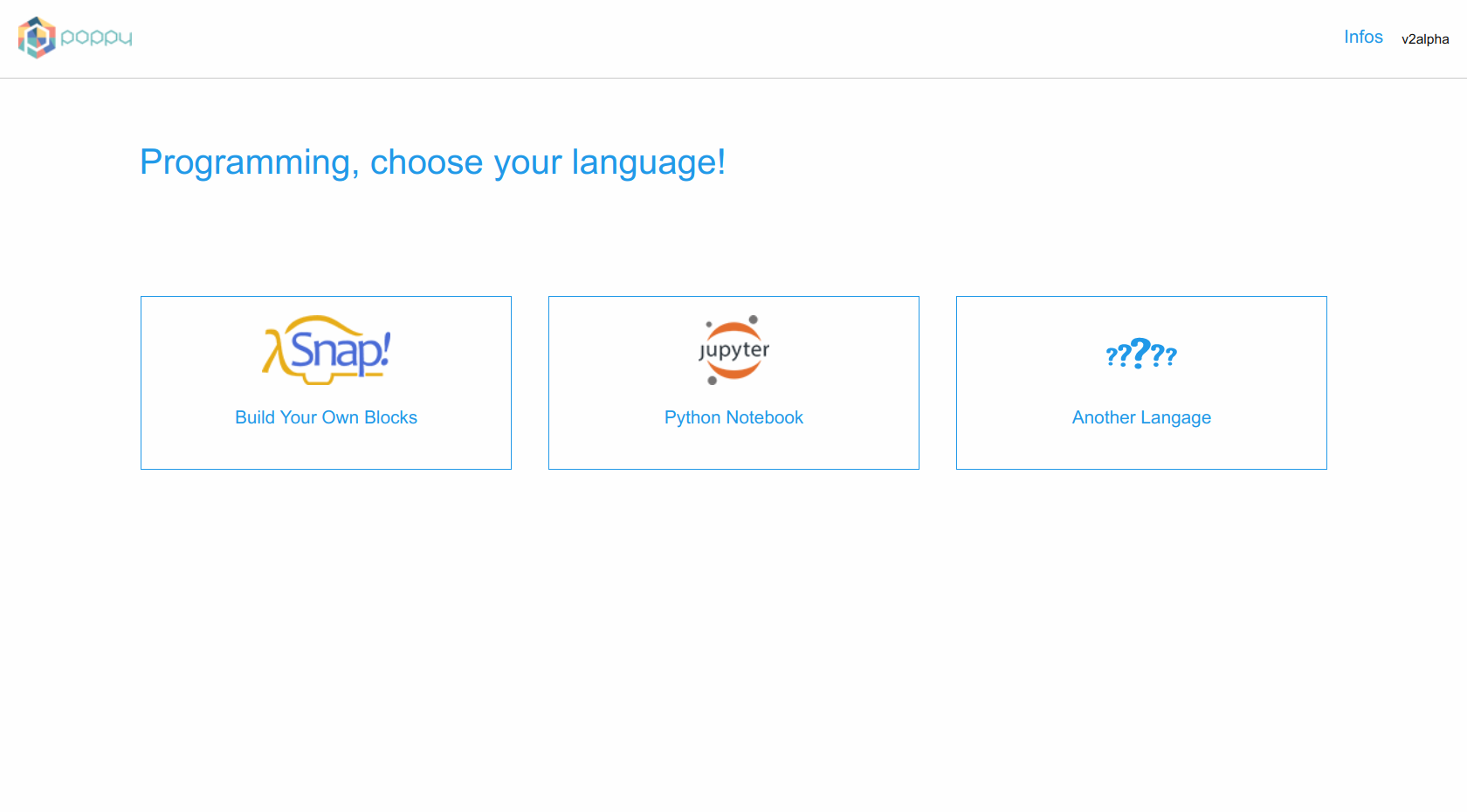
- in programming tab show screenshot
- another language (notebooks)
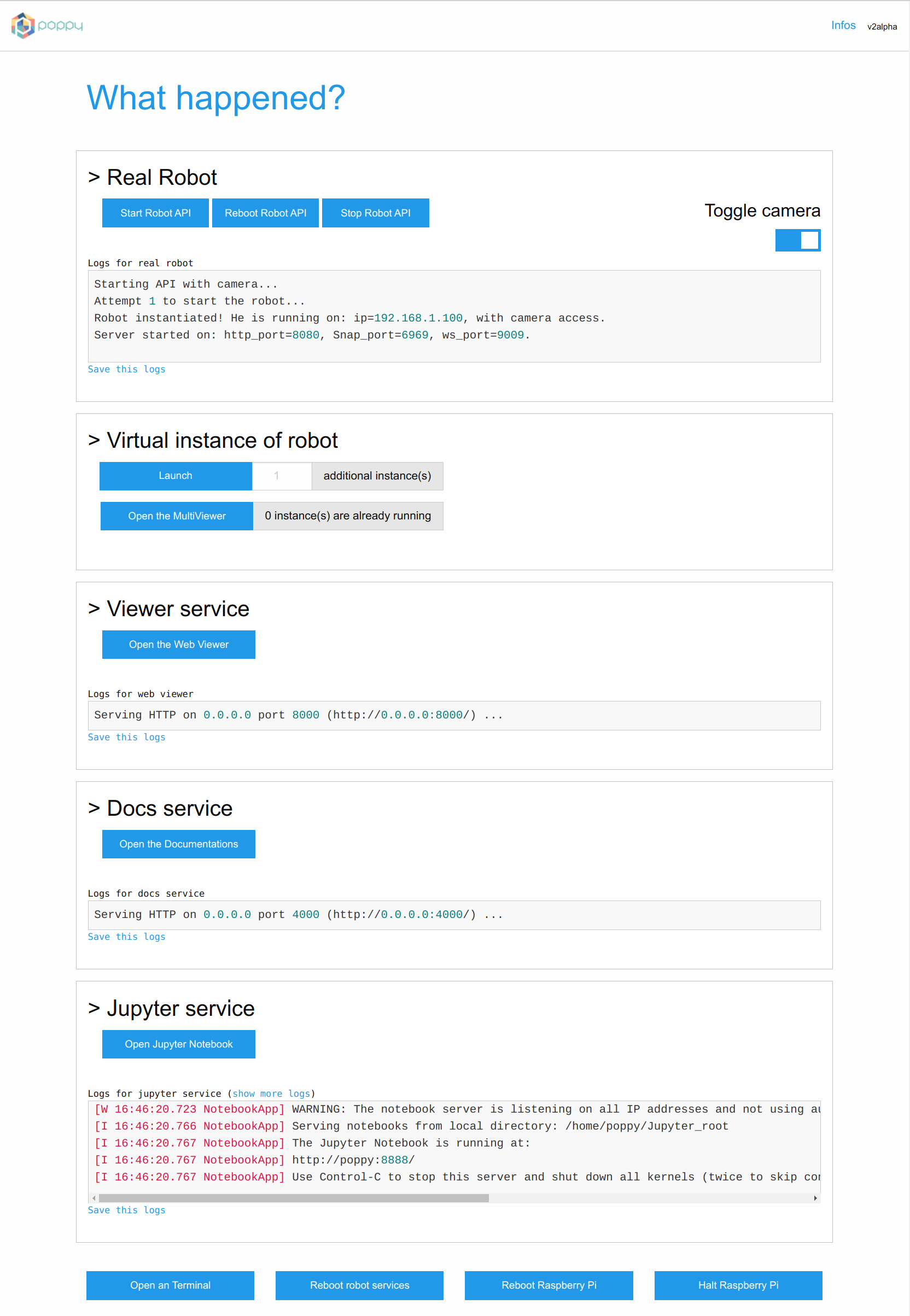
- in what happened page show screenshot
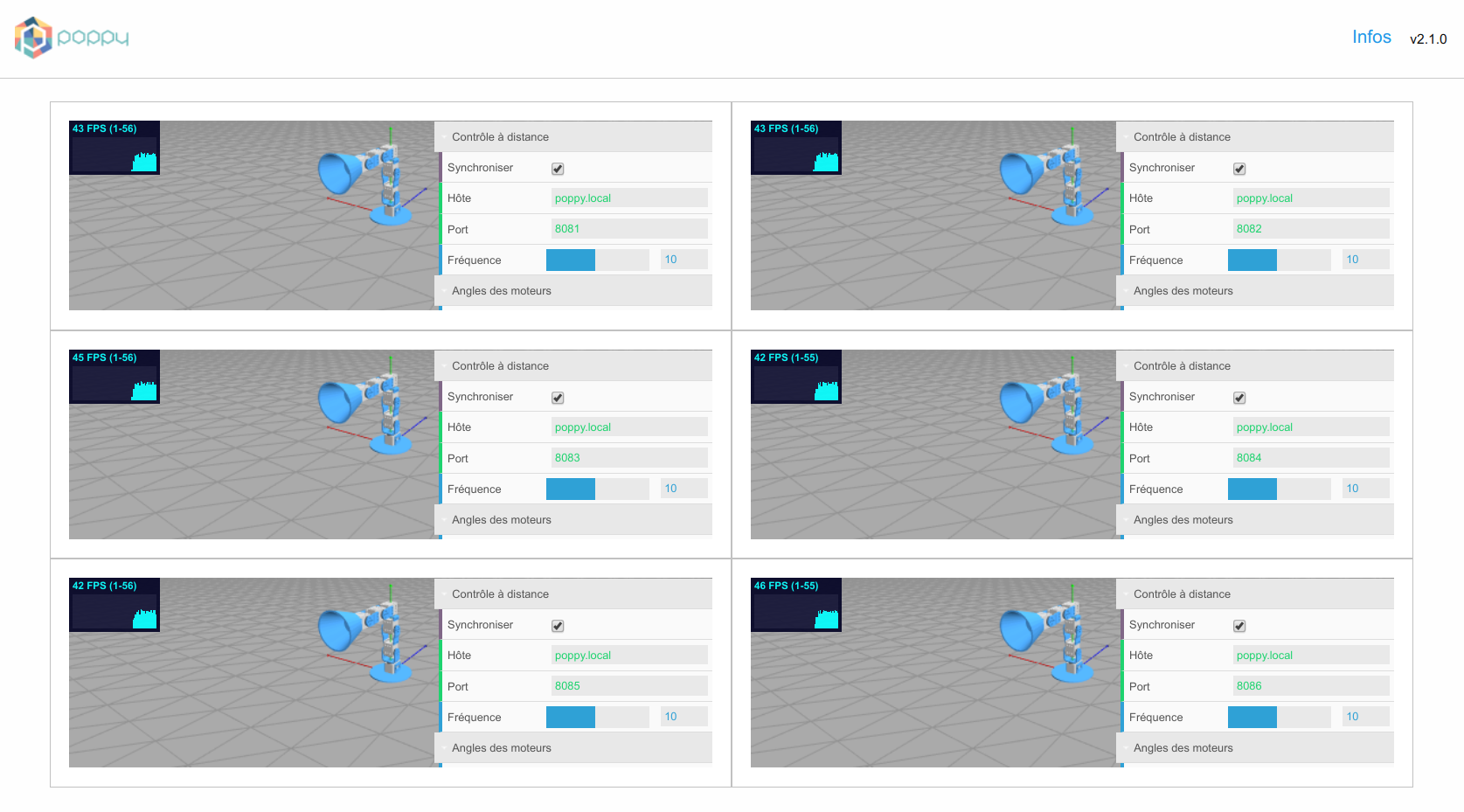
- poppy multiview (open html page) add screenshot
Moved pages:
- monitor and control (open poppy-monitor app) to monitor and control folder as primitive manager (open poppy-monitor app)
- snap (open snap app) to programming folder
- jupyter to programming folder, previous behavior: open jupyter root, now: open default_notebook
- remove reset tab in index page
Changed pages:
- index (== HomePage) changed tab, add sub-tab, show above…
- jupyter root (== MyDocuments) show screenshot
- create symlink to
- Moves recorded
- Snap project
- Robot primitives
- My Pictures
- poppy-viewer and poppy-docs in poppy_src folder
- rename poppy_src to poppy source-code
- move
- notebooks to notebooks folder
- snap and poppy monitor to root of poppy source-code folder
- create symlink to
- settings show screenshot
- add function
- set language (all is not translated)
- set wifi
- set hotspot
- set API auto-starting
- set virtual instance auto-starting
- set state for first-page
- set motor
- add button
- open an terminal
- restarte services (jupyter, puppet-master, docs and viewer services)
- reboot raspberry
- shutdown raspberry
- add function
- what happened show screenshot
- manage logs
- display control (‘show more’ / ‘show less’)
- save in file
- add logs for all virtual instance, for viewer, docs and jupyter service
- add button
- start / stop / reset APi
- toggle camera
- luanch n virtual instances / open multiview / open viewer for instance n
- open viewer / open docs / open jupyter
- open an terminal / restarte services / reboot raspberry / shutdown raspberry
- manage logs
Screenshot page:



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}