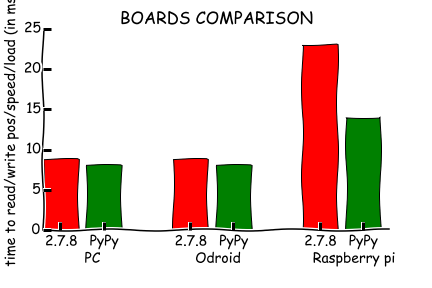
On an average PC or a board such as the odroid Pypot is rather light and fast.
Even if everything works on the raspberry pi, it kind reaches the limit of what this board can do.
PyPy seems to improve quite significantly pypot’s performance. It could be an option to consider!
All scripts used in those benchmarks are available and can be used to test other boards. The data can be downloaded here. So don’t hesitate to complete those bench with other boards!
Testing with pypot read/write…
Done in 4.45884299278ms (STD=0.882047581831)
Testing with pref-forged packed…
Done in 2.85709762573ms (STD=0.874964667771)
Testing with direct serial read/write…
Done in 2.02617764473ms (STD=0.395869009249)