Sur le principe, transporter l’énergie avec une tension plus haute que celle dont on a besoin et la réduire au point de consommation, c’est théoriquement alléchant.
Mais quand on met tout les autres facteurs en jeu, ca devient vite moins rose.
Oui, le convertisseur aura l’avantage d’immuniser le servo des baisses de tension du bus, et on aura moins de perte de puissance dans les fils (quand on regarde uniquement les fils, P=RI^2 et U=RI, donc en doublant U à résistance constante on a divisé l’intensité par 2 et la puissance perdu dans les fils par 4).
Mais en même temps, on aura ce convertisseur DC/DC à chaque servo. Ca coûte cher, et pour faire passer les quelques ampères que le servo nécessite, il sera gros et il chauffera.
De plus, selon le design, ce convertisseur n’aura pas forcément la meilleure réponse aux demandes instantanées de courant (quand on lance le moteur, il a tendance a demander beaucoup de courant), et c’est potentiellement electro-magnétiquement bruyant (peut rendre la lecture d’ADC plus bruitée, et si vous voulez vendre ça un jour, ça pourrait peu-être rajouter un point délicat vis a vis des certifications CE/FCC).
Quant à la consommation énergétique… il faut compter entre 5 et 15% de pertes en gros, ce qui vu la consommation d’un servo en charge, est fera une baisse non négligeable du temps d’activité d’un robot sur batterie.
Pour info, sur les device Dynamixel que j’ai créé, j’ai mis un convertisseur DC/DC, et je pense que les servos comme les AX / MX bénéficieraient d’en avoir un (chauffe moins que le LDO qu’ils ont actuellement), mais tout cela ne concerne que de petites puissances (quelques centaines de mW), pour la logique et les capteurs. Dès qu’il y a un moteur en jeu c’est plus du tout pareil (dizaines de W).
Pour moi la solution parfaite n’est pas très évidente… Il faudrait que pour la partie communication on ai toute liberté de connexion, mais que l’intégrité du signal soit préservée, et que niveau puissance on ai un circuit de distribution qui permettre à la fois une distribution aisée et peu de pertes… Pas si simple.
En organisant la partie puissance pour qu’elle commence en étoile près de l’alim puis passe en chaîne quand la somme des consommation des nœuds restant est suffisamment basse pour ne pas poser de problèmes au nœuds connectés, on peut déja réduire le problème des baisses de tension. Dans mes robots ca se manifeste par une connexion directe de chaque membre à la carte d’alimentation par de gros cables, avec gros borniers ou connecteurs de puissance sur la carte d’alim.
Les connecteurs Molex SPOX 2.50mm utilisés dans les Dynamixels sont pas du tout fait pour passer de grosses intensités, comme le dit la datasheet:
Current - Maximum per Contact 3.0A
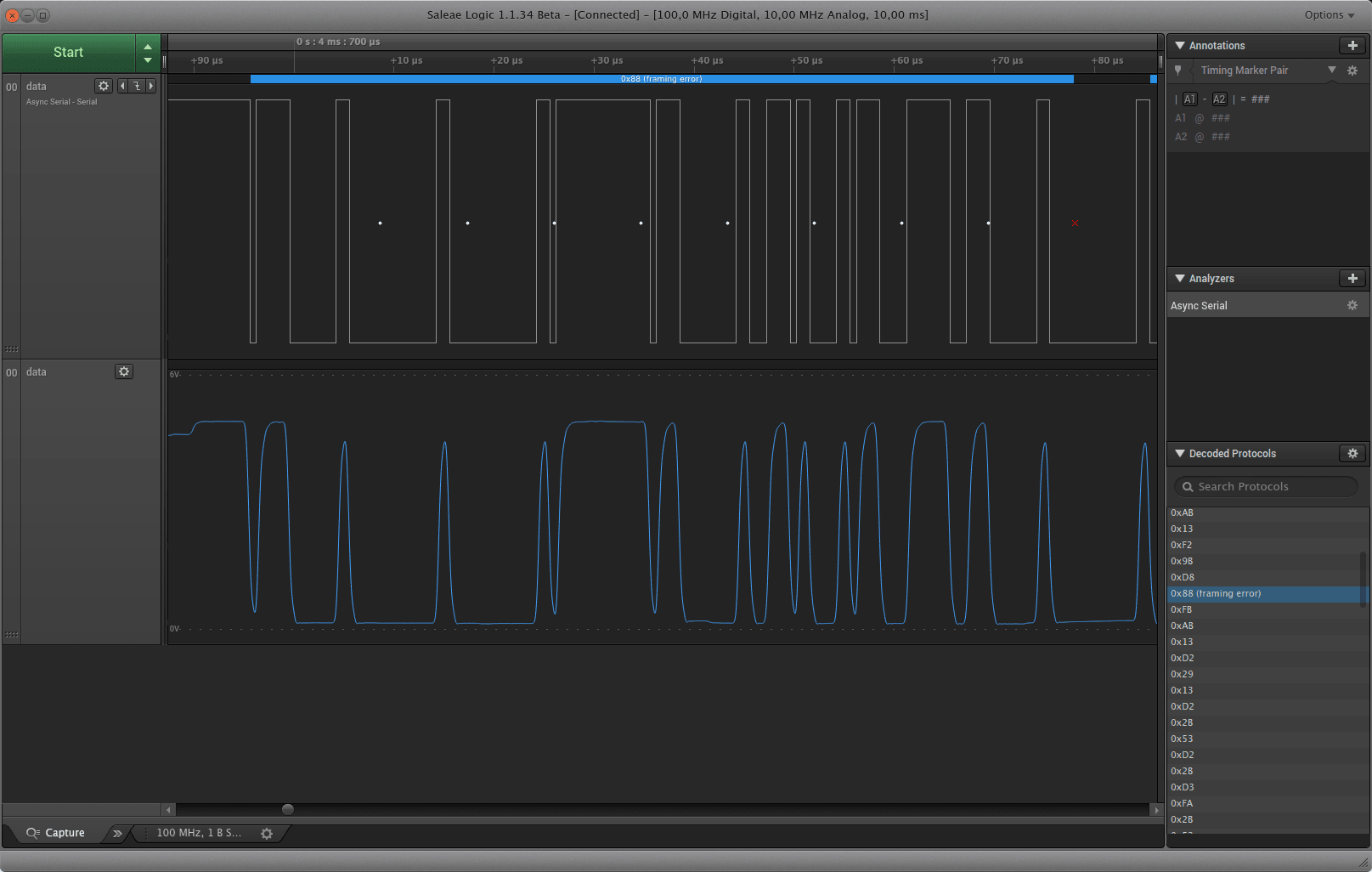
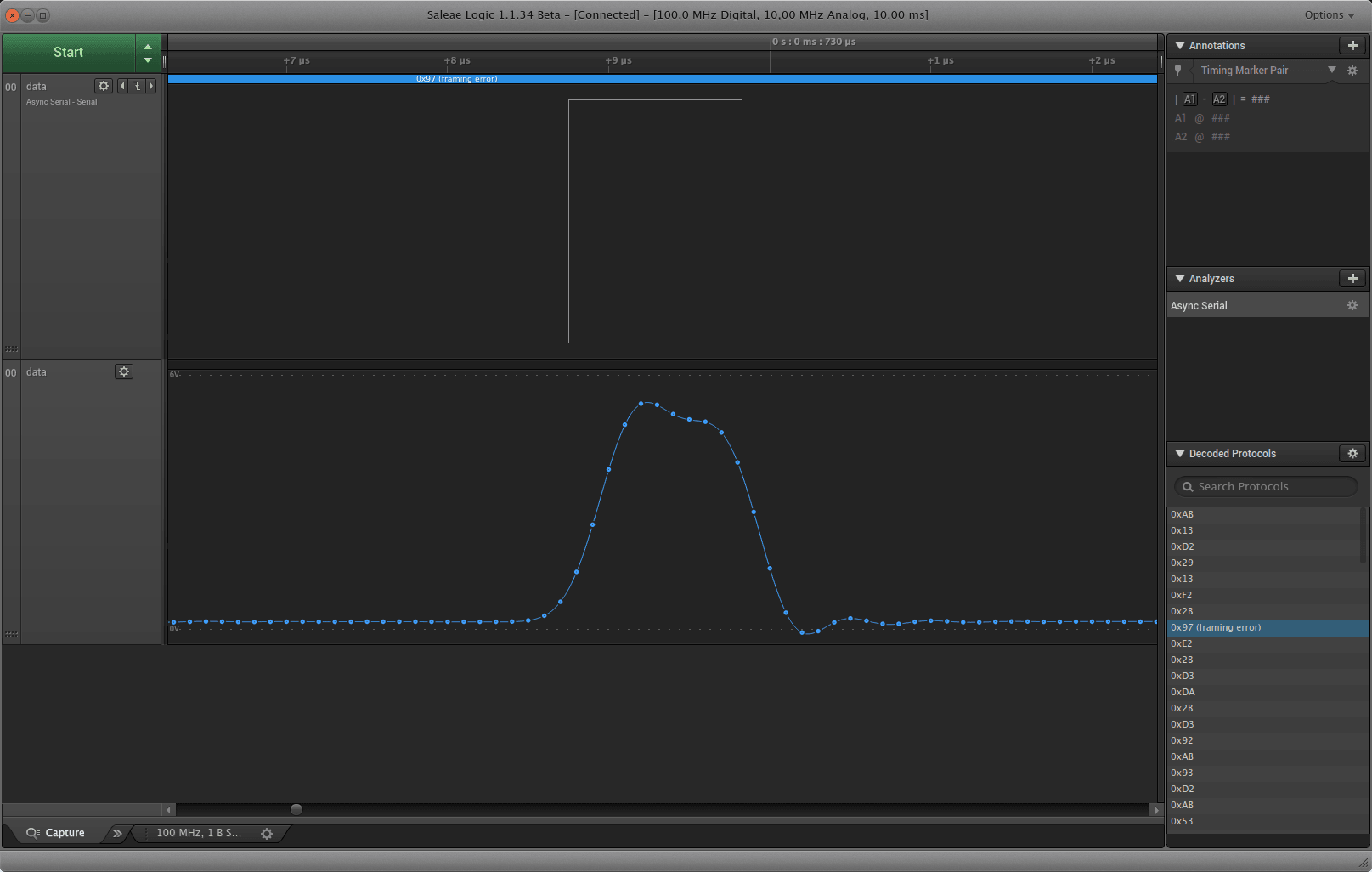
Conserver l’intégrité du signal, c’est éviter ce qu’on voit dans les posts juste au dessus, qui est causé par un ensemble de problèmes d’impédance. Ca passe à la fois par ce qu’on connecte (éviter de mettre de la capacitance ou resistance sur la ligne de donnée) et par la façon dont les fils sont agencés (en particulier la relation physique entre le fil de signal et le chemin de retour, qui est la masse dans note cas. Il faut qu’ils soient proche l’un de l’autre.).
Petite apparté sur la baisse de tension vue au bout de la chaine: elle n’affecte pas que la tension vue par le moteur, ca a aussi un impacte sur la ligne DATA. Si au servo du bout le chaine, on mesur une baisse de 1V entre GND et VCC par rapport à l’alim, étant donné que les fils de VCC et GND sont les mêmes (section, longueur et chemin pris), et bien on a 0.5V de perdu sur le fil de masse.
Comme le fil DATA ne porte pas de courant important, lui est presque au même potentiel sur toute sa longueur (en régime établi uniquement, pas lors de la transition qui elle est affectée par d’autres problèmes)… donc le servo en bout de ligne, avec sa référence (son pin GND) qui est “remonté” de 0.5V, et bien il voit DATA 0.5V plus bas que ce que le premier servo de la chaine aura vu. Et quand il parlera sur le bus, ce qu’il dit sera vu par le contrôleur entre 0.5V et 5.5V. Encore un peu de dégradation du signal… 




 Le projet sur lequel je bosse en ce moment demande vraiment tout mon temps, désolé.
Le projet sur lequel je bosse en ce moment demande vraiment tout mon temps, désolé.