Bravo @Alexandre ! Nous avons hâte de voir bouger cette créature ! Et très bonne idée la version torso !
Discutez vous avec @poppyrate ?
@oudeyer merci j’ai hâte aussi de vous le montrer en train de faire des mouvements
Nous discutons avec @poppyrate en ce moment pour les différentes technologies électroniques que nous pourrons utiliser dans nos robots. Cependant, ce sont quand même des cousins éloignés.
Awesome work @Alexandre, I am also working on my project Max with very slow progress 
But I find a lot of similar servo placement in servo. Gave a gut feeling  Grt job.
Grt job.
One q : what is your plan of placing battery and edision?
Are you placing intel edision in the belly section of bot and battery at back?
I am yet to design that.
NicoX
Hi @NicoX, your project Max is great too.
I am placing the edison and the battery at back. See you the picture. For the battery I have not decided yet, this is a test for now. I try to find a solution to put the battery easily


That is a superb way of keeping bats in belly. I will copy your idea into max for sure
For torso/spine I though of roll/pitch/yaw in a bit different way. I will update with pic in my thread there. Please have a look next week end though. Keep it up @Alexandre e will talk about the progress then
Regards
NicoX
Je suis à la recherche d’une carte électronique aussi puissante et pratique que la raspberry, mais en plus petit. Il s’avère que l’Intel Edsion n’est pas pratique à utiliser malgré sa petite taille qui est très intéressante dans le cas de Fendi.
Il y a bien l’odroid ou la pcduino, mais elles ne sont pas plus petites
Salut,
Je ne vois pas de carte pc plus petite que ça a part l’openCM9 mais on ne peut pas utiliser python dessus.
En quoi l’intel edison n’est pas pratique ? Ca m’intéresse.
@Thot
Je suis en train de pencher en ce moment pour l’odroid XU4, qui a vraiment l’air bien.
Ce qui n’est pas pratique au niveau de l’Intel, c’est qu’il n’y a pas d’interface (tout est en ligne de commande), donc pour apprendre à programmer aux enfants ce n’est pas pratique (je rappelle que c’est un des buts aussi de Fendi). De plus, l’installation des packages… N’est vraiment pas facile, d’ailleurs je n’ai pas encore réussi à installer pypot. Le prix est tout de même assez élevé.
Ce qui m’intéresse avec l’odroid :
- Installation facile
- Interface.
- Port USB, HDMI… du même côté, donc c’est facile de brancher un écran au robot, déjà valider avec Poppy.
Pour un prix équivalent à l’Intel. Seul problème, elle prend de la place et je ne sais pas si je vais pouvoir l’intégrer.
Je viens vous donner des nouvelles de Fendi, dû à des contres temps personnel, je n’ai pas vous présenter mes avancées.
Nous nous étions arrêtés sur le choix de la carte électronique, ce choix a été maintenant décidé, ça sera la raspberry A+. Je pense qu’elle est assez performante pour pypot et au niveau dimension elle me convient, en plus, elle est légère et consomme peu par rapport à l’odroid. Je voulais aussi avoir une sortie HDMI, pour s’affranchir du pc, je pense que c’est intéressant pour une école d’avoir Fendi en tant que mini-pc.
Voici quelques photos du torse avec l’électronique:

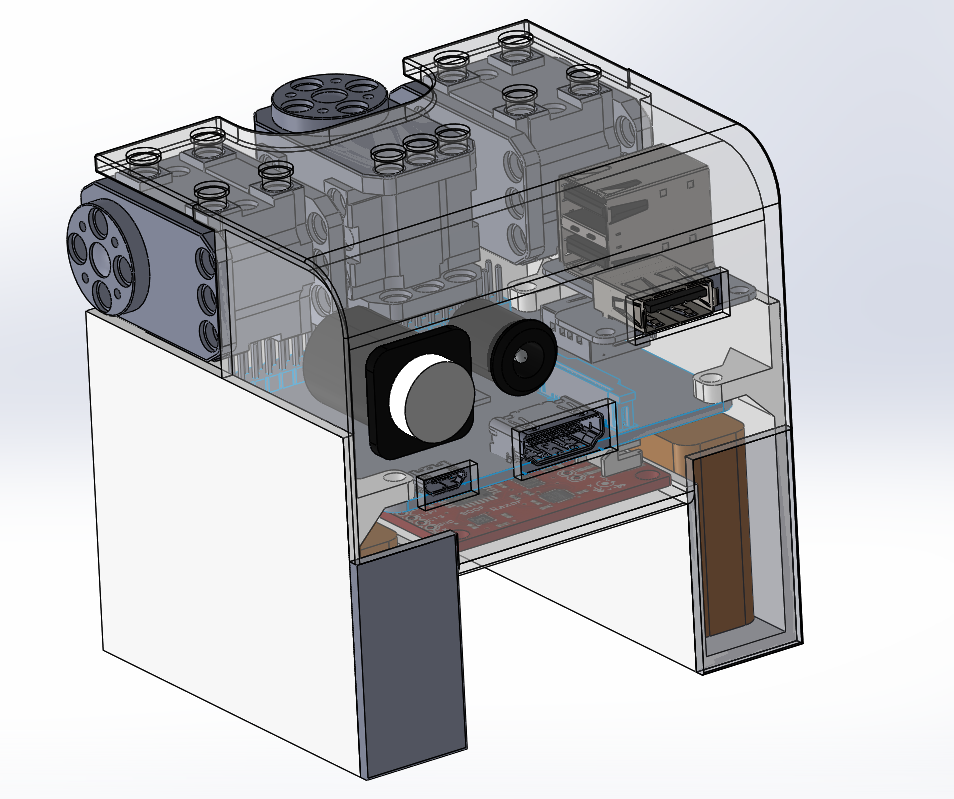

Il y a donc la raspberry, l’IMU, 2 batteries (soit un total de 2000mAh) et un hub USB. Pour le moment, je n’ai pas mis cette version en ligne car je ne suis pas satisfait du design, je le trouve moche. De plus, il faut que j’approfondisse un peu plus l’électronique avec notamment un convertisseur de tension 7.4V/5V/3.3V. Je pense finaliser cette version pour la fin de l’année, je me suis concentré ce mois-ci sur la version sans électronique, c’est-à-dire que le robot devra être en permanence branché au secteur et au PC. Cette version permettra de travailler sur le code, de faire des présentations et d’avoir un robot moins cher.
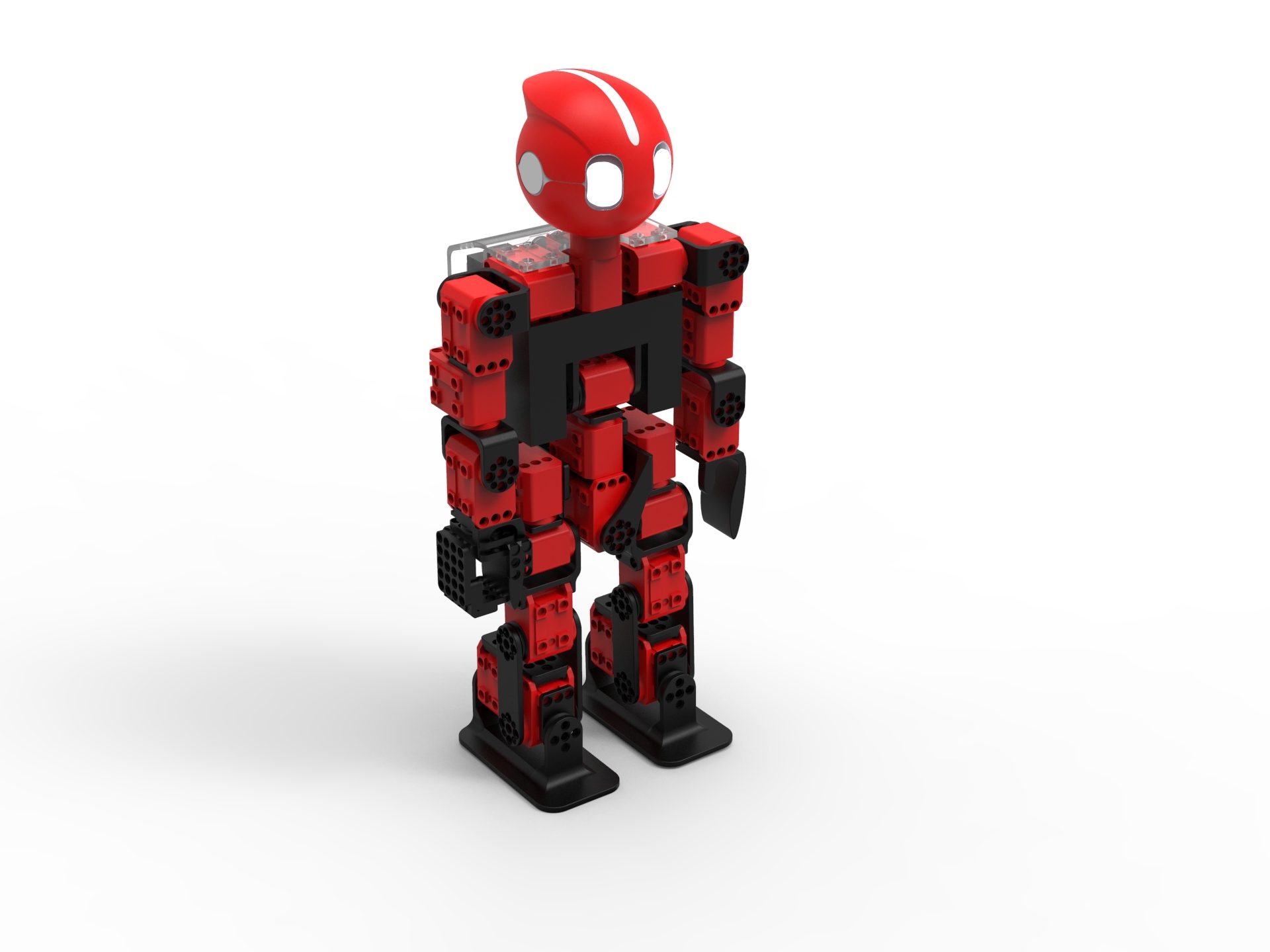
Clémence, notre designer qui a fait les croquis de la tête en a fini sa conception, vous pouvez voir quelques rendus :




J’ai aussi corrigé quelques bugs de pièce et j’ai mis tous les fichiers en ligne sur github. Il vous est maintenant possible de participer officiellement au projet Fendi. Le robot étant complet avec la tête. Il manque plus que le code et quelques tests d’impression et je pourrai préparer une release.
Je souhaite aussi faire un hub pour les XL-320, connaissez-vous un logiciel sympa et facile à utiliser pour faire ça, ainsi que des fabricants de carte électronique ?
J’adore toutes tes nouveautés, l’integration de la raspberry est une très bonne idée et la tête est super. Tu sais avec quelle outil elle a fait ça ?
Pour faire de l’électronique tu as circuit maker et pour produire tu peux utiliser circuithub.
Il ne reste maintenant plus qu’à tester tout ça ![]()
Bien sûr, c’est Solidworks 2015. Pour un souci de cohérence et gestion des fichiers, je souhaite utiliser le même logiciel pour toute la 3D de Fendi
Ce n’est peut-être qu’une impression mais la tête me fait beaucoup penser à celle du Darwin mini.
Qui a modélisé cette tête sur SW? la designeuse ou toi?
C’est qu’une impression, la tête du darwin n’ai pas du tout pareil ![]() Par exemple, le darwin mini n’a pas de nez, les côtés (oreilles) sont plats, la tête est ouverte derrière, les yeux sont ronds, il a deux oreilles… Il y a quand même pas mal de différence qui ne sont peut-être pas visible sur ces photos
Par exemple, le darwin mini n’a pas de nez, les côtés (oreilles) sont plats, la tête est ouverte derrière, les yeux sont ronds, il a deux oreilles… Il y a quand même pas mal de différence qui ne sont peut-être pas visible sur ces photos
C’est la designeure qui l’a modélisé, je me concentre plutôt sur la partie intégration de l’électronique et la conception du corps. Comme c’est elle qui a fait les dessins, elle a continué sur la conception 3D.
Bonjour,
Petit bilan rapide du projet pour vous dire qu’il a changé de nom. Fendi devient Heol. La raison principale a été que nous avons été contactés par la société Fendi qui vend des vêtements de luxe et qui nous a demandé de retirer le nom. Heol signifie soleil en breton. Nous avons choisi ce nom, car nous pensons qu’il correspond bien aux valeurs du projet qui sont de redonner le sourire aux enfants, d’apporter du bonheur, d’apprendre la programmation et de jouer au foot. Et tout ça sous le soleil 
Voici donc les nouveaux liens à suivre
Site web, Facebook, Twitter
Le projet continue d’avancer à part ces problèmes administratifs, la tête est imprimée et est en cours de livraison, vous aurez donc bientôt de nouvelles photos
Le dépôt de marque se fait par catégorie. Je pense pas que nos amis qui font des vêtements de luxe aient déposé dans toutes les catégories…
Cela dit, Heol c’est bien aussi ^^
Tout à fait d’accord avec toi, j’avais vérifié les marques dans les catégories intéressantes pour le robot lorsque j’avais choisi Fendi. Malheureusement, je n’ai pas déposé la marque et l’entreprise Fendi on prit certaines catégories intéressantes. Dans tous les cas, nous avons préféré ne pas nous battre contre la marque Fendi qui fait partie du groupe LVMH. De plus, le projet est encore peu connu donc l’impact est limité  Nous trouvons aussi qu’Heol correspond mieux à la philosophie du projet
Nous trouvons aussi qu’Heol correspond mieux à la philosophie du projet
Bonjour,
Petite nouvelle du projet, la tête a été imprimée et certains bugs ont été corrigés. Voici quelques photos, cela sera plus parlant.


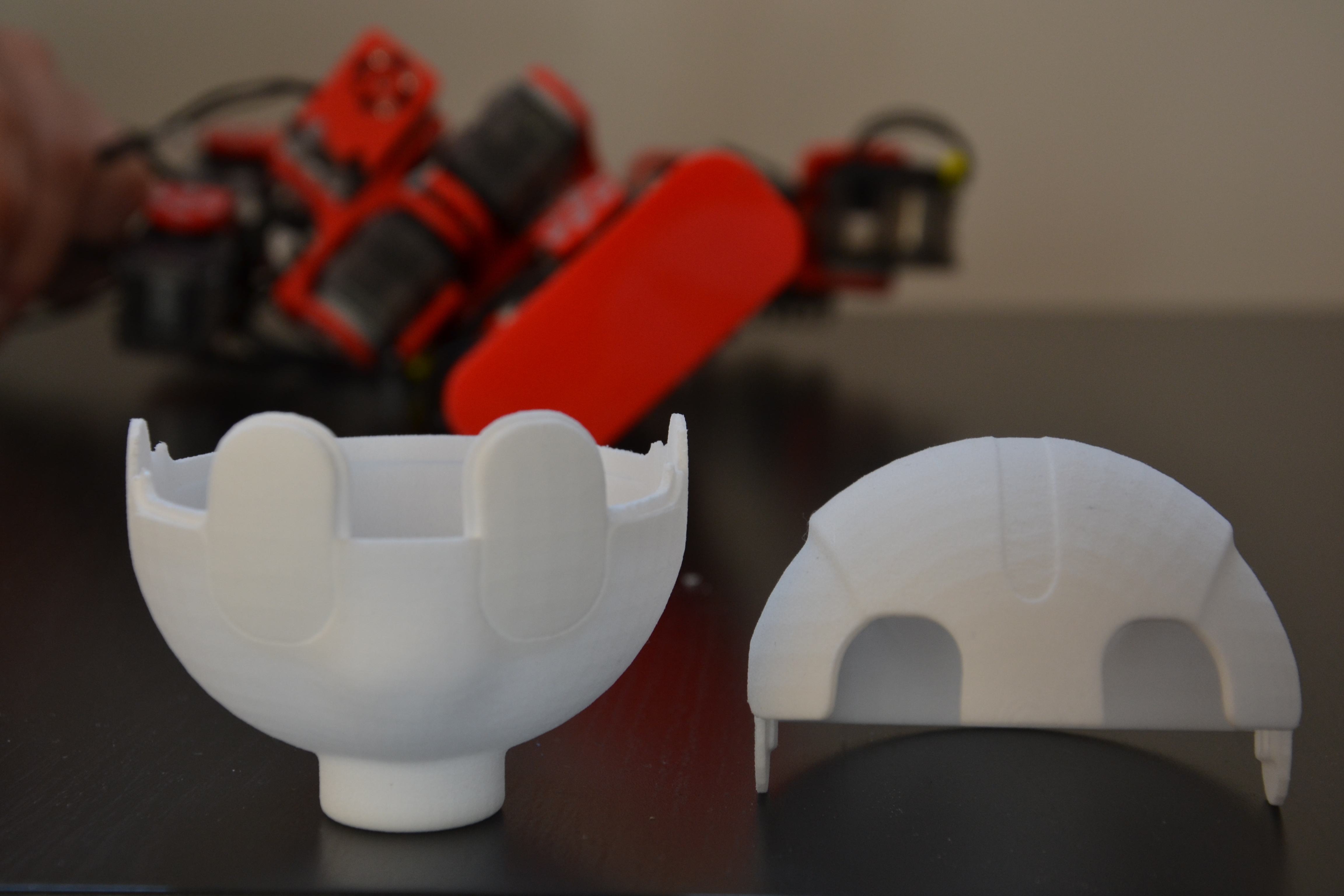

Au niveau électronique un hub pour XL-320 est en cours de fabrication. La conception sous Eagle est terminée. La première version humanoïde sera donc complète et opérationnelle. Vous trouvez bien sûr toutes les sources du projet sur github.
N’hésitez pas à nous suivre sur Twitter et Facebook si ce n’est pas déjà fait 
Heol a maintenant une version simulée dans V-REP.
Pour tester : pip install heol-humanoid
Bonjour,
Je remercie Julien d’avoir posté cette vidéo pour montrer que le projet évolue. Il est vrai que cela faisait longtemps que je n’avais pas posté de sujet. Le projet avance toujours aussi bien, il n’y a pas d’inquiétude à avoir.
Nous nous sommes concentrés sur la partie software, le simulateur fonctionne avec Heol avec l’aide de @juju. Elle est complètement fonctionnelle, cela veut dire que les mouvements créés sur le simulateur sont les mêmes sur le robot réel. Même angle de rotation… Snap est aussi intégré à la plateforme, merci à @Pierre , qui m’a aidé sur une erreur. Voici une petite vidéo pour montrer que ça fonctionne.
Une grande nouvelle et c’est ce point qui nous a pris le plus de temps, c’est la création d’une association pour Heol, Heol robotics (très rechercher comme nom). Elle a pour but de parler au nom d’une équipe, de rechercher des partenariats pour nous aider à développer Heol et à participer à des évènements. Un article de blog lui est consacré. Pour l’occasion, nous avons changé « légèrement » le site web, je vous promets ça vaut le détour.
Je le rappelle, n’hésitez pas à nous suivre sur twitter et Facebook pour être au plus proche de l’actualité