Hi,
In another thread, I briefly touched on the Dynamixel Devices that I was working on.
First, the idea is not new. Creating a board that can be connected to a Dynamixel bus and used to expose a sensor or actuator has been done multiple times, from the Dynamixel IO Board and IMU boards by HUV Robotics, to multiple closed source ones that have never been talked about freely, to my own multiple attempts (4 already). But so far nothing stuck, and it’s still not possible to buy one anywhere.
The appeal is easy: add sensors or other actuators anywhere on your robot with one simple 3 or 4 cable interface to power and talk to all of them. No mess of cable, no diversity of connector or protocol.
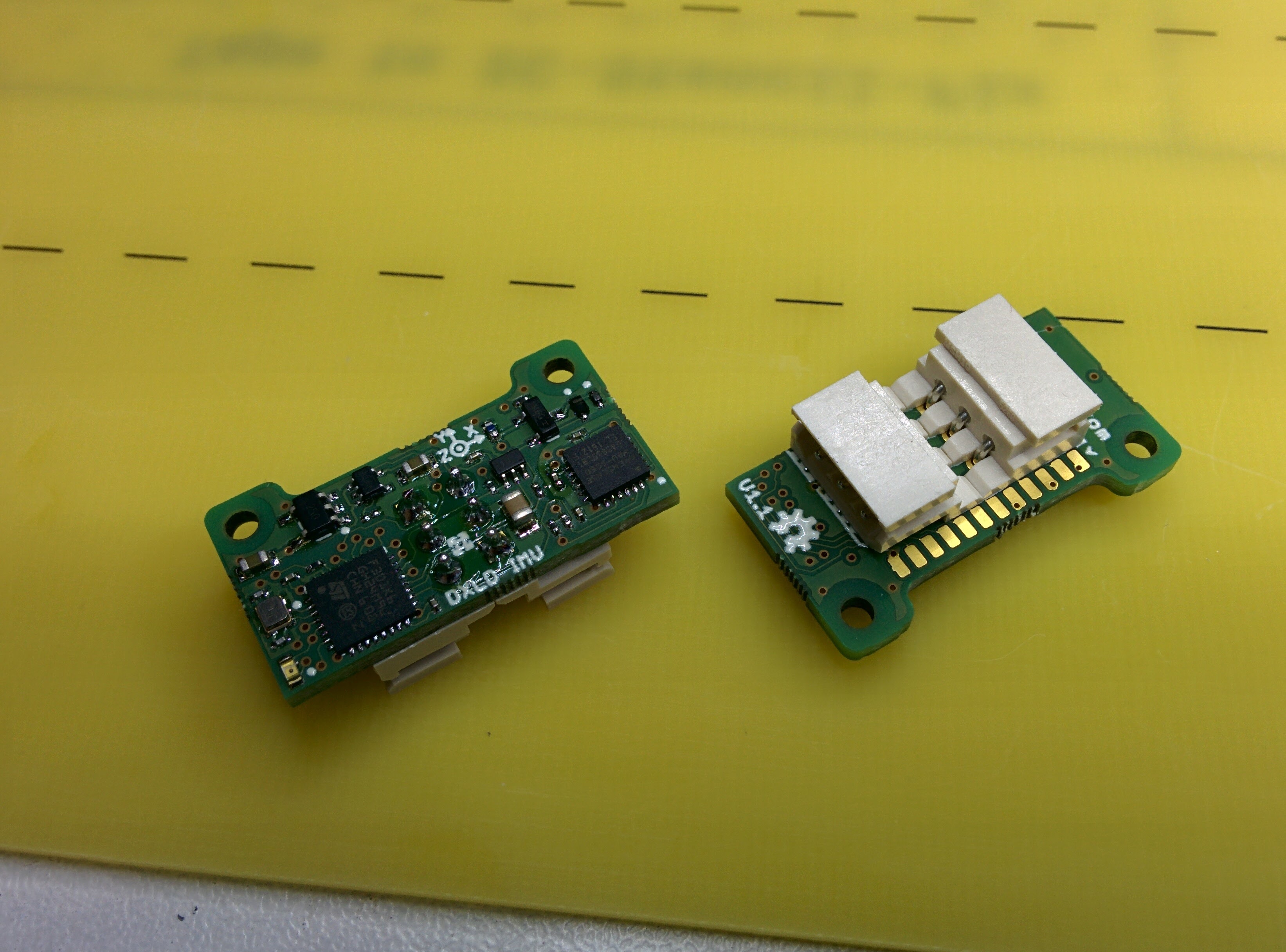
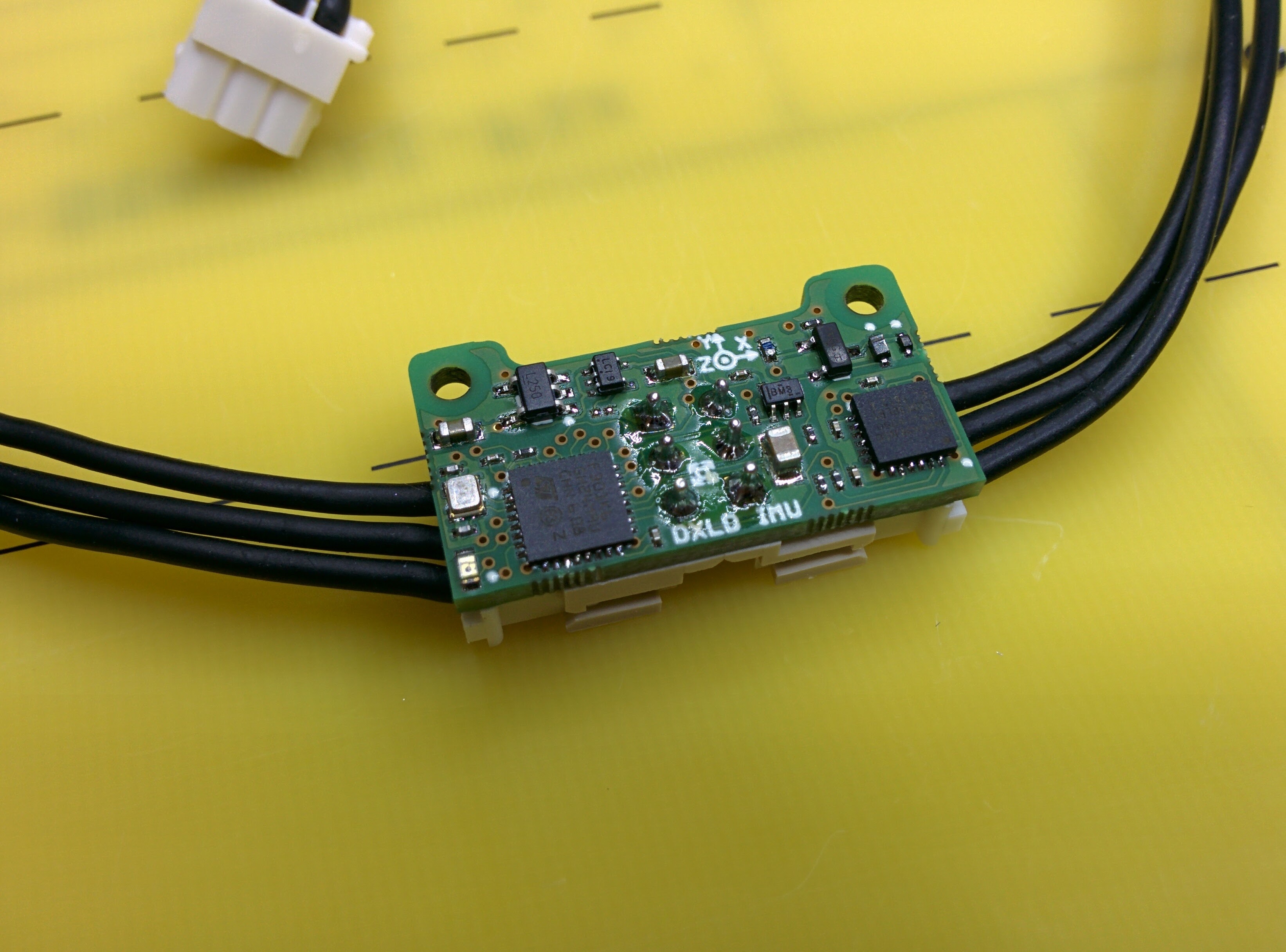
Here are my new attempts: an IMU board named DXLD IMU, and an interface board DXLD Interface.
dxld is the name of my dynamixel device lib that I released last year (and which nobody gave a **** about), and these will use the new version of that lib.

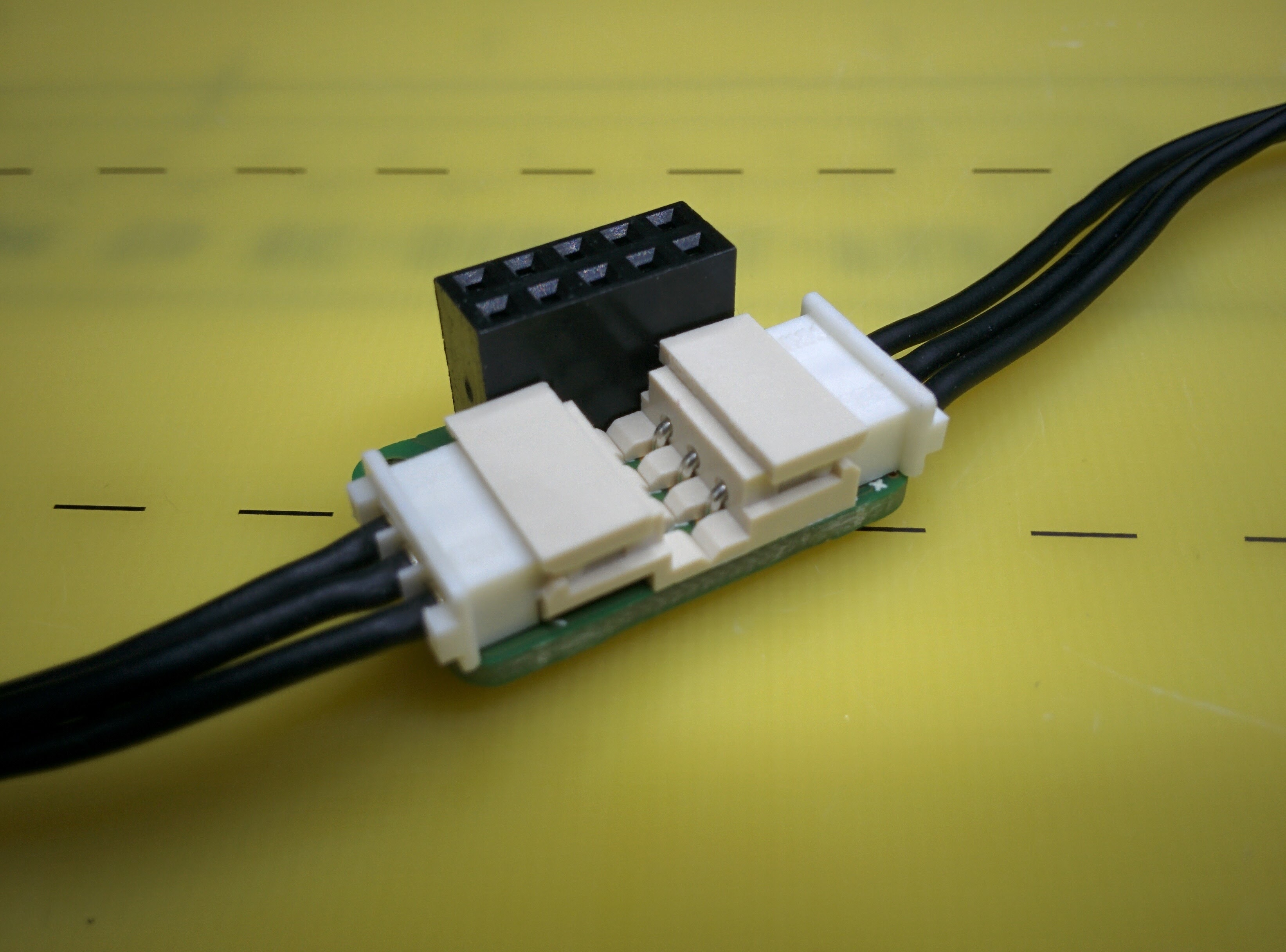
They are as small as technically possible while keeping 2 right angle Dxl connectors (for low profile) and M2 mounting holes. When the cables are connected the volume taken does not go up, meaning that the 26mm long PCB is the same length as two connected male+female connectors.
I could have gone with a side-by-side arrangement instead and landed a 22x21mm form factor for the IMU one, but not for the interface.
DXLD IMU is 26x14mm, with M2 holes 22mm apart.
It has a MPU-6050, and that’s about it. lots of 1.27mm debug pads on the bottom though.
I made it mostly for Thot, with the idea to test a lot of things on his robots.
DXLD Interface is 24x15mm with M2 holes 20mm apart.
It has a 2x5 2.54mm header that can be plugged into a breadboard, or used directly to connect stuff to.
The pins are 12V, 5V (500mA thanks to a DC/DC converter), 3.3V, GND and 6 GPIOs that also multiplex as PWM, 4 ADCs, I2C, SPI and a serial port (it’s possible to use SPI + serial or SPI + I2C or serial+ I2C).
The first thing this board will interface with is a very lightweight Lidar that I have been working on too, and that will be the object of another post.
Both boards share the same architecture, same MCU (STM32F301, Cortex-M4 @ 72MHz with FPU, 3.3V) and same Dynamixel level converter and protection. It can talk on the bus at up to 3Mbps (maybe more, I’ll have to verify).
For now, they are aimed at the TTL Dynamixel bus used by the AX series and some MX, but I might make other versions.
With the USB2AX Pro, it’s possible to imagine having many, many of these in a robot and still be able to have a full-robot loop (get info from everything, send info to everything) that takes only a few ms.